
Bluetooth and radar traffic sensors: A practical guide for travel time, speed and count data collection
Bluetooth and radar sensors measure different things and are most effective when used together. Combining roadside sensors with probe-based mobility data gives agencies both location-specific detail and broader network coverage.
Transportation professionals increasingly rely on multiple roadside sensing technologies when projects require precise location specific measurements. Two of the most widely deployed sensor technologies are Bluetooth traffic sensors and radar traffic sensors. Each is designed to measure different aspects of roadway performance and each plays a distinct role in modern traffic data collection.
Because these technologies answer different operational questions, selecting the right sensor depends on the type of traffic insight required. Understanding their strengths and limitations helps transportation professionals choose the most effective data collection approach for a given project.
Bluetooth traffic sensors
How they work
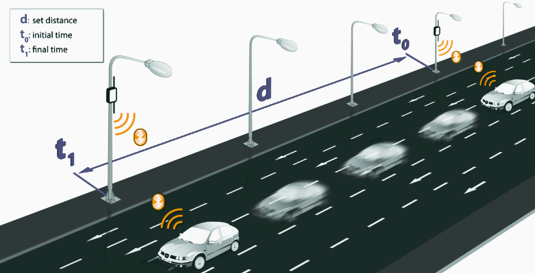
Bluetooth traffic sensors are designed to measure how traffic moves between locations along a corridor. They detect Bluetooth or Wi-Fi signals emitted by mobile devices inside passing vehicles and capture the device’s MAC address, a unique identifier that allows the same device to be recognized at multiple locations. This identifier is anonymized to protect privacy. When sensors are installed at two or more points along a roadway, the system matches the same anonymized identifier between sensors and calculates the travel time between detection points.
Bluetooth sensing produces a sample of traffic movements rather than a full count of vehicles. However, the ability to match vehicles between locations makes Bluetooth one of the most practical tools for measuring real-world travel time on arterial corridors.
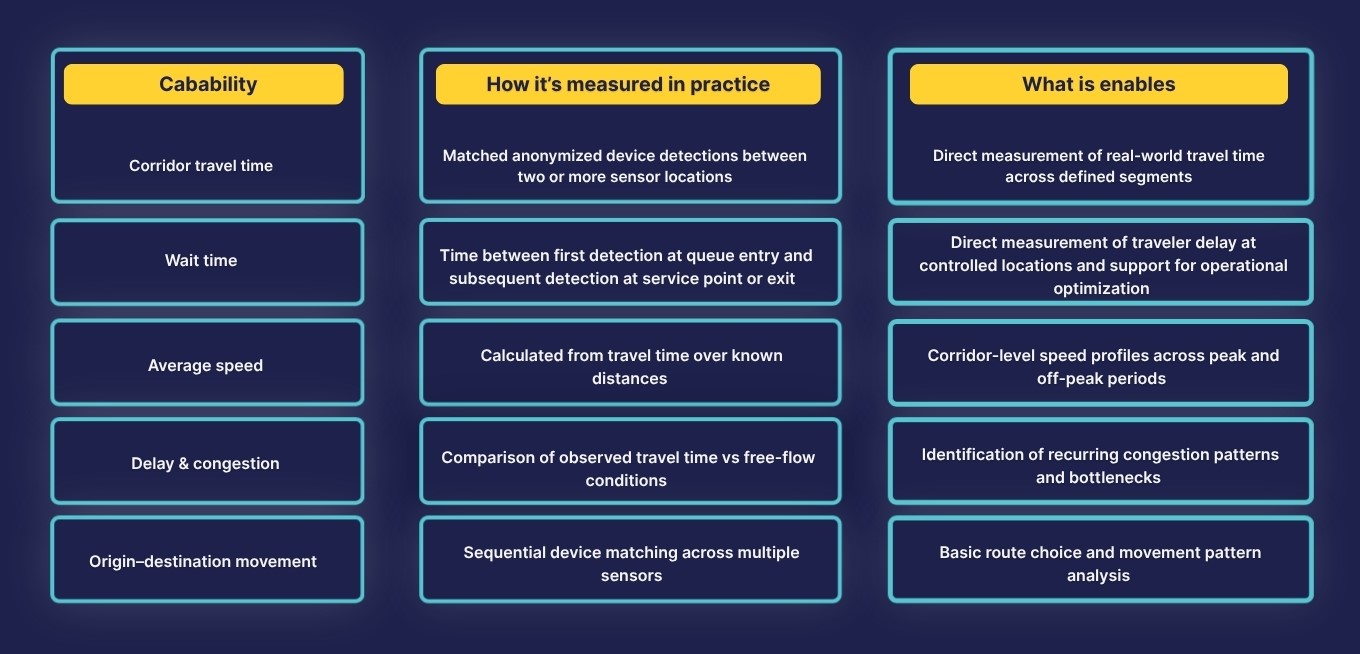
What Bluetooth sensors measure
Bluetooth sensors are commonly used to analyze:
- Corridor travel time
- Average speed derived from travel time
- Delay and congestion patterns
- Origin-destination patterns when multiple sensors are deployed
These metrics are particularly valuable for corridor performance monitoring and operational studies where understanding how traffic moves along a route is more important than counting every vehicle.
Bluetooth sensors: Field capabilities
Strengths of Bluetooth sensors
Bluetooth sensors are widely used because they offer several operational advantages:
- Accurate measurement of corridor travel time
- Effective monitoring of congestion, and delays
- Lower installation cost compared with many other sensor technologies
- Flexible deployment for temporary studies
Because the sensors are portable and relatively inexpensive, they are often deployed for short-term monitoring projects or corridor studies.
Limitations of Bluetooth sensors
Bluetooth sensing also has several constraints:
- Data represents a sample of traffic rather than full vehicle counts
- Detection rates depend on device penetration
- Not suitable for lane-level or classification analysis
As a result, Bluetooth sensors are typically used when understanding movement along a corridor is more important than measuring every vehicle.
Common use cases
Bluetooth sensing is commonly used for:
- Corridor travel time and performance monitoring
- Work zone mobility studies
- Special event traffic monitoring
- Wait time measurement
- Basic route choice and movement pattern analysis
For projects requiring precise vehicle counts or speed measurements, agencies typically combine Bluetooth sensing with other sensor technologies.
Radar traffic sensors
How they work
Radar traffic sensors are designed to measure vehicle behavior at a fixed location. It uses microwave to detect vehicles traveling through the sensor’s field of view. By measuring changes in the frequency of reflected radar signals, the system can determine vehicle speed and presence.
Because radar sensors observe vehicles directly rather than detecting mobile devices, they produce continuous traffic counts and highly accurate speed measurements.
Many modern radar systems can also estimate vehicle classification based on object length and movement characteristics.
Beyond data collection, radar can also support operational and safety functions such as wrong-way detection and intersection actuation by identifying vehicle presence, approach, speed, and direction in real time. Those capabilities are important, but they are outside the scope of this article, which is focused specifically on radar as a traffic data collection tool.
What radar sensors measure
Radar sensors typically provide:
- Traffic counts
- Vehicle (point) speed
- Direction of travel
- Lane-level detection
- Object classification (Truck, passenger vehicle, bicycle, pedestrian, etc.)
- Queue length
- Wrong-way detection
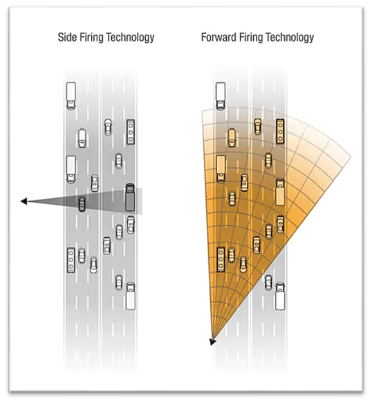
These measurements make radar sensors particularly valuable for traffic operations, safety studies, and permanent monitoring programs. It's worth noting that not all radars offer the same capabilities - for example, queue length and wrong-way detection are typically only available with forward-firing radars, such as Smartmicro radars.
Radar sensors: Field capabilities

Strengths of radar sensors
Radar technology provides several advantages:
- Continuous full-volume vehicle detection
- Highly accurate speed measurement
- Lane-level monitoring capability
- Reliable performance in low light and adverse weather
Because radar sensors directly observe vehicles, they produce high-quality operational traffic data used in many permanent monitoring programs.
Limitations of radar sensors
Radar sensors also have constraints:
- Data is limited to a specific physical location
- Hardware and installation costs are higher than Bluetooth sensors
- Deployment cannot realistically scale across an entire road network
As a result, radar sensors are typically installed at strategic monitoring locations rather than across large areas.
Common use cases
Radar sensors are commonly used for:
- Permanent traffic count stations
- Speed monitoring programs and safety studies
- Vehicle classification studies
- Work zone mobility studies
Data transmission and edge processing
Traditionally, traffic sensor data was retrieved manually. Field technicians would periodically visit each site to download data directly from the device, often using portable equipment or storage media. This applied to both radar and Bluetooth sensors, and it meant that data was only available well after collection.
Many modern sensors now support remote data transmission, sending data automatically through cellular or network connectivity. This allows traffic data from both sensor types to be accessed without field visits and reduces delays between collection and analysis.
Edge computing devices take this a step further by processing raw sensor data at the roadside before it is transmitted. Rather than sending large volumes of unprocessed data to a central server, an edge computer performs initial filtering, anonymization, and aggregation locally, reducing bandwidth requirements and enabling faster delivery of actionable metrics. SMATS TrafficXHub is an example of an edge computing platform purpose-built for roadside traffic data collection and processing.
Cloud data platform, analytics and visualization
Remote data transmission and edge processing solve the problem of getting data off the sensor. A cloud-based analytics platform solves the next challenge: organizing, archiving, and making sense of that data over time.
Cloud-connected platforms automatically ingest incoming sensor data, archive it historically, and provide analytics tools for traffic volume, speed, and performance monitoring. Rather than managing individual data files from each sensor, transportation professionals access a centralized environment where all field data is stored, cleaned, and ready for use. SMATS iNode is an example of a cloud-based platform that ingests data from both Bluetooth and radar sensors and provides unified analytics, visualization, and reporting tools.
Extending coverage beyond roadside sensors
Bluetooth and radar sensors provide valuable field measurements, but like all roadside detectors, they can only monitor specific physical locations. Installing and maintaining sensors across an entire road network is often costly and operationally complex.
For this reason, many modern transportation programs deploy hardware sensors at strategic locations while relying on probe-based mobility data to fill coverage gaps.
Probe data, also known as Floating Car Data, is collected from GPS-enabled vehicles and mobile applications, and provides scalable visibility across thousands of road segments without field data installation. This allows agencies and consulting teams to analyze travel patterns, speeds, and congestion across areas where fixed sensors are not available.
In practice, roadside sensors deliver high-accuracy measurements at key locations, while probe data provides network-wide coverage that helps transportation professionals understand traffic behavior across the broader system.

Choosing the right data collection approach
The most effective traffic monitoring strategies begin by identifying the traffic performance question first, then selecting the best technology to answer it.
Some projects require precise vehicle counts. Others focus on travel time reliability, congestion monitoring, or corridor performance. In many cases, transportation programs combine multiple complementary data sources to balance coverage, accuracy, and cost.
Understanding how these tools fit together is the first step toward building a scalable, data-driven approach to transportation monitoring.
